
どうも高周波数のPWMで動かすにはパワーMOSFET系のトランジスタじゃないとダメらしい。
パワーMOSFET系のトランジスタはNchのを2種類(しかも1つはチップトランジスタ)しか持ってないので、フルブリッジは作れない。作れないことはないけど、他に部品(ゲートドライバIC)が必要。→秋月のキット参照の事
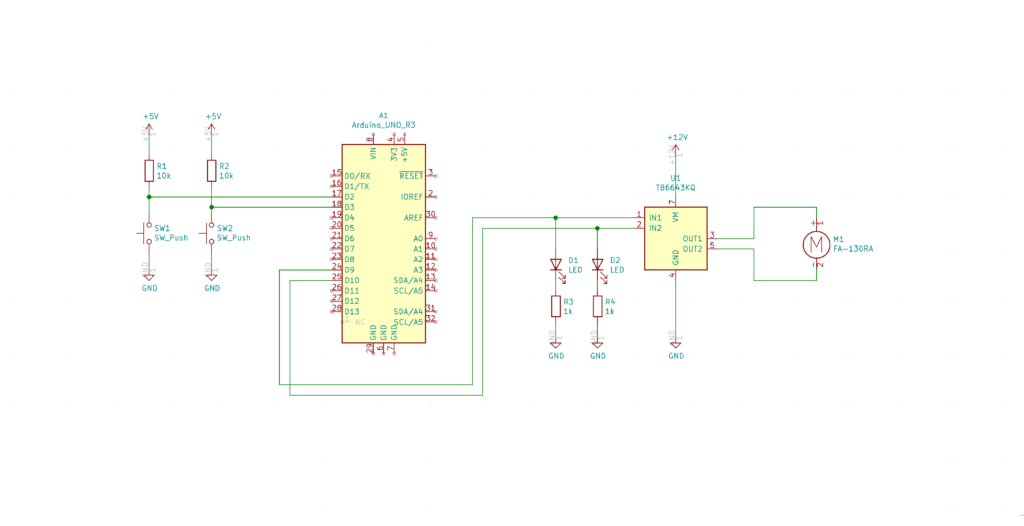
「確か先日、モータドライバを2種類(TA8428K, TB6643KQ)買っておいたのがあったなぁ…」とデータシートを確認したら、TB6643KQがMOSFET系だったので、急遽差し替えて試してみたら無事に動いた。
回路図は次のようになっています。
スケッチをGitHub.comに登録してみました。
https://github.com/physicam/tb6643kq_pwm30khz
スケッチは次のようになっています。
#define PIN_SW1 2 // Speed Up
#define PIN_SW2 3 // Speed Down
#define PIN_IN1 9 // Output Pin for IN1
#define PIN_IN2 10 // Output Pin for IN2
#define MAX_VALUE 256
#define LIMIT_VALUE (MAX_VALUE-1)
#define DELTA_SPEED (MAX_VALUE/8)
int prev_sw1 = HIGH;
int prev_sw2 = HIGH;
int value_speed = 0;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
Serial.println("TB6643KQ PWM 30kHz");
pinMode(PIN_SW1, INPUT); // Speed Up
pinMode(PIN_SW2, INPUT); // Speed Down
pinMode(PIN_IN1, OUTPUT); // Output Pin for IN1
pinMode(PIN_IN2, OUTPUT); // Output Pin for IN2
// PWM 30kHz
TCCR1A = 0b00000001;
TCCR1B = 0b00000001;
analogWrite(PIN_IN1, value_speed);
analogWrite(PIN_IN2, value_speed);
}
void loop() {
// put your main code here, to run repeatedly:
int curr_sw1, curr_sw2;
curr_sw1 = digitalRead(PIN_SW1);
curr_sw2 = digitalRead(PIN_SW2);
if (curr_sw1 != prev_sw1) {
if (curr_sw1 == LOW) {
// これが押された判定
Serial.println("sw1");
if (value_speed == -LIMIT_VALUE) {
value_speed = -MAX_VALUE;
}
value_speed += DELTA_SPEED;
if (value_speed > LIMIT_VALUE) {
value_speed = LIMIT_VALUE;
}
updateSpeed();
}
prev_sw1 = curr_sw1;
delay(10);
}
if (curr_sw2 != prev_sw2) {
if (curr_sw2 == LOW) {
// これが押された判定
Serial.println("sw2");
if (value_speed == LIMIT_VALUE) {
value_speed = MAX_VALUE;
}
value_speed -= DELTA_SPEED;
if (value_speed < -LIMIT_VALUE) {
value_speed = -LIMIT_VALUE;
}
updateSpeed();
}
prev_sw2 = curr_sw2;
delay(10);
}
}
void updateSpeed() {
if (value_speed > 0) {
Serial.print("(");
Serial.print(value_speed);
Serial.println(", 0)");
analogWrite(PIN_IN2, 0);
analogWrite(PIN_IN1, value_speed);
} else if (value_speed < 0) {
Serial.print("(0, ");
Serial.print(value_speed);
Serial.println(")");
analogWrite(PIN_IN1, 0);
analogWrite(PIN_IN2, -value_speed);
} else {
Serial.println("(0, 0)");
analogWrite(PIN_IN1, 0);
analogWrite(PIN_IN2, 0);
}
}