ちょっとブザーを鳴らすテストをしようとして、出来るだけ小さくしたいと調べていたら、M5StickC Plus2が電源もあって、ブザーが入っているのでコレでいいやと思っていたら、「そういえばM5StickCがあったな…」と出してみたら、USBケーブルで接続して電源ボタンを押しても起動しないので、「長いこと放置していたからバッテリーがダメになったかな?」と調べてみたら、次のような記事が見つかった。
https://qiita.com/kazuhidet/items/7c0c6fa7995fa5da6e9a
「なるほど…」とArduino IDEで確認したら起動はしているようだった。FactoryTestスケッチを書き込んでみたらLCDも表示されて起動した。
ただし、次のイメージのようにLow Battery please charge!と表示される。

追記:一晩、この状態で放っておいたけど、回復せず…
追記:BATとGNDを短絡してUSBにつないで充電するというのも試すけど、どうも手応えがない。
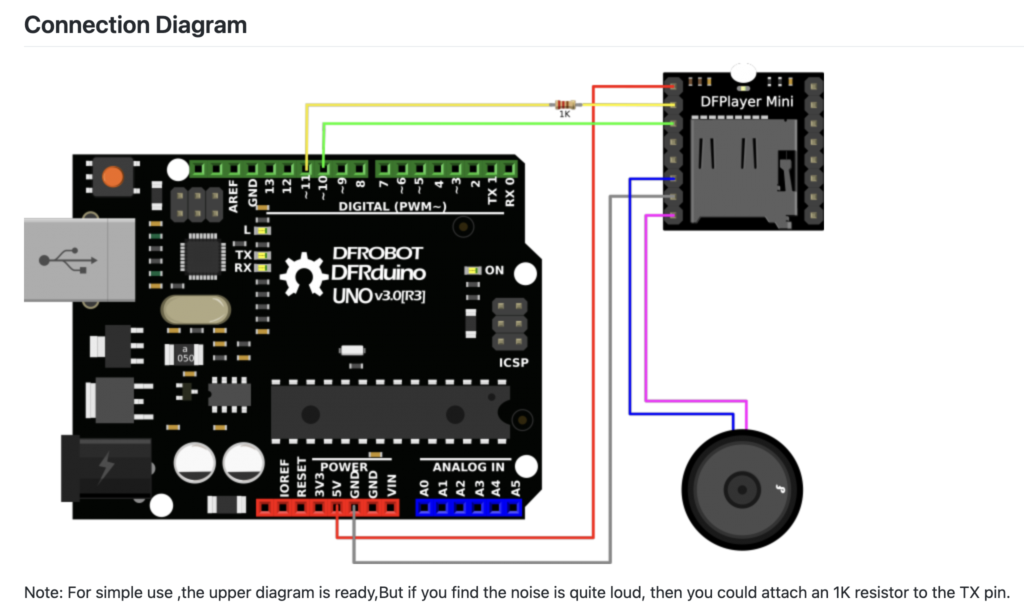
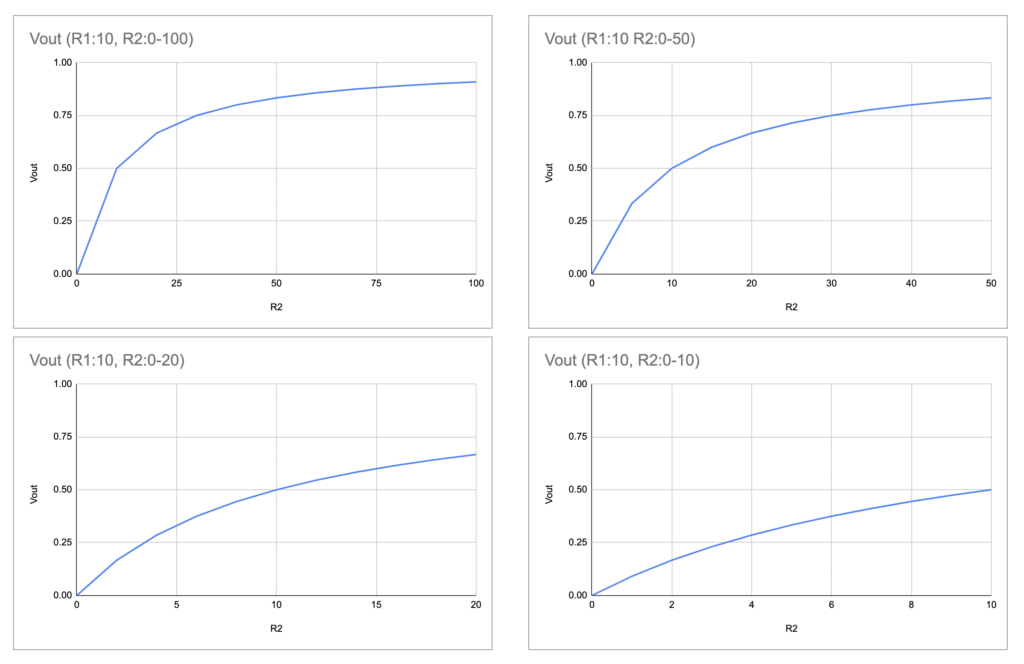
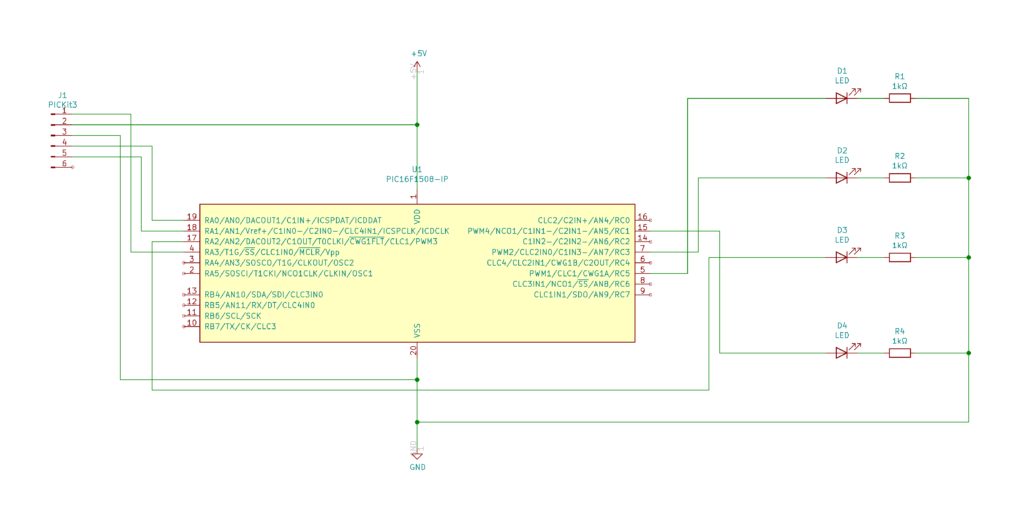
追記:「電源管理用ICチップをリセット」の部分に書かれていた、1kΩの抵抗でG03V3を接続して充電するというのも試すけど、手応えがない。
追記:今度は「M5StickC low battery please charge!と表示される」と検索すると、「M5StickCの内蔵バッテリーが充電されない問題 → 解決」という記事が出てきたので、読んでみたらコメント欄のアドバイスで充電できたとのこと。
コメント欄には、「AXP192のスケッチを実行した状態で、BATと3V3を短絡すると一度画面が消えて、再度電源を入れるとバッテリー電圧が0じゃなくなる」ということなので、まずはAXP192のスケッチを…と探したら、今はM5StickC > Advanced > AXP192 > PowerWakeというスケッチを書き込んで実行させたら、vbat: 0Vだった。
そこで、BATと3V3を短絡すると一度画面が消えるので、そのまま数分放置して、USBケーブルを抜いて、再度挿したらvbat:が0Vじゃなくて、増えていく状態になったので、短絡しているジャンパーを抜いて放置中。

追記:vbat:は3Vを越えるとだんだん遅くなって、4V以降はなかなか増えない。と思ったら4.19Vになったらいいらしい。
追記:USBケーブルを抜いて、電源OFFして電源ONで動くことを確認できた。でも、みるみるうちにvbat:が減っていき1分くらいで落ちた(電源OFF)。
多分、先ほどの記事の追記部分のように徐々に回復していくんだと思う。