PIC16F1827でI2Cをテストした。
先日試したEUSARTを経由してMacで確認できた。
MCCでの設定
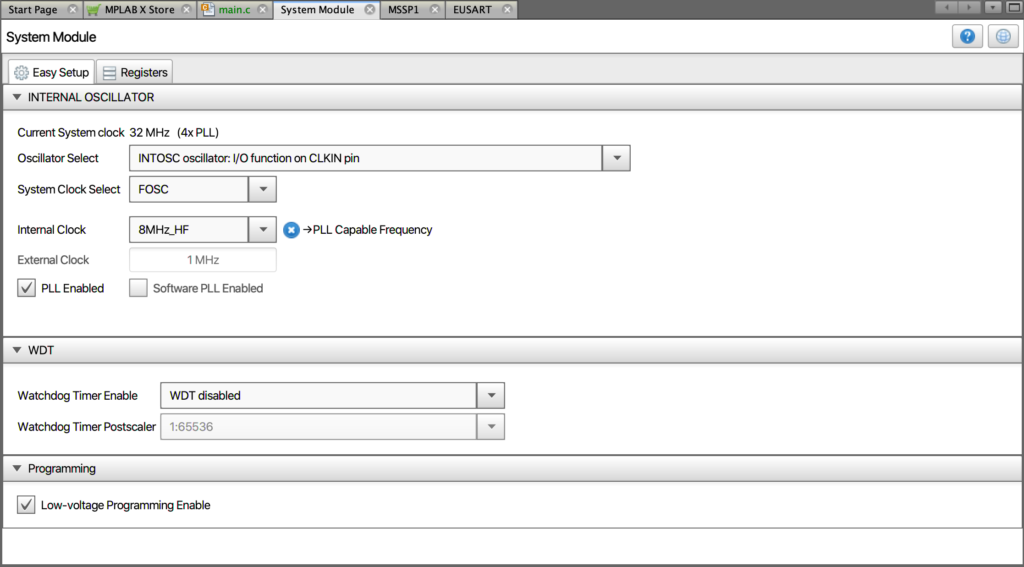
MCCで内蔵オシレーターで32MHzで動くように設定。
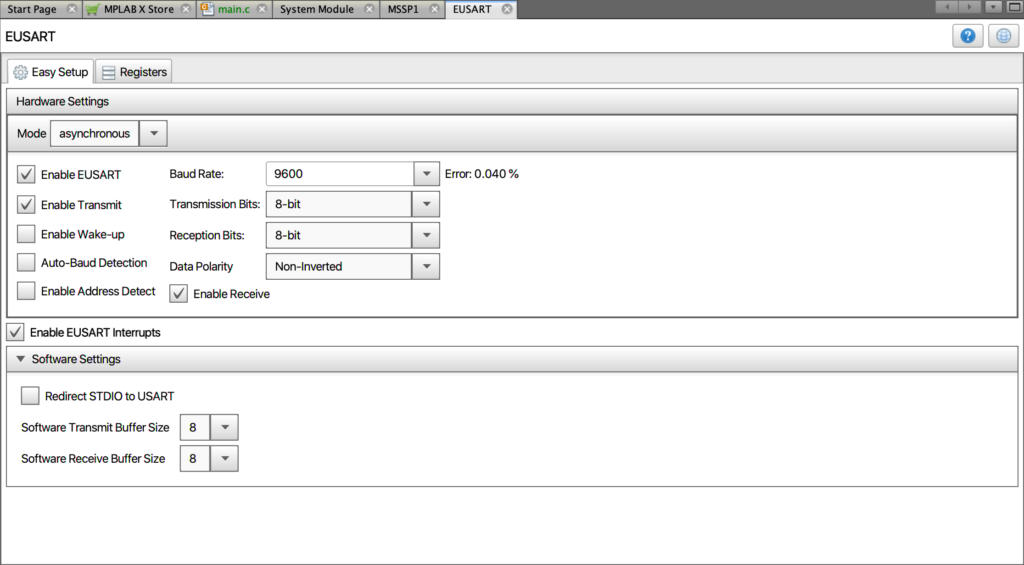
続いてEUSARTを9600bpsに設定。
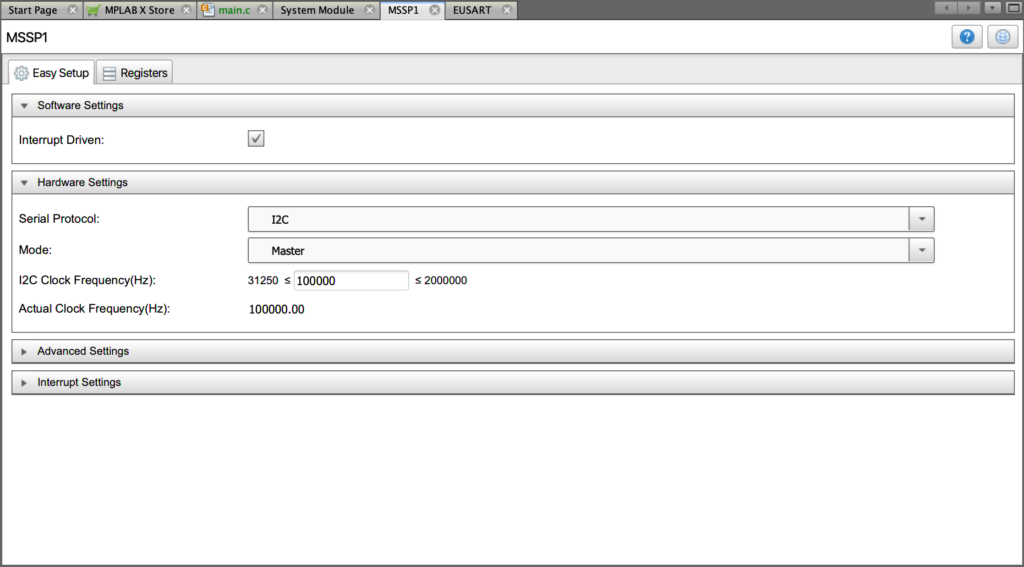
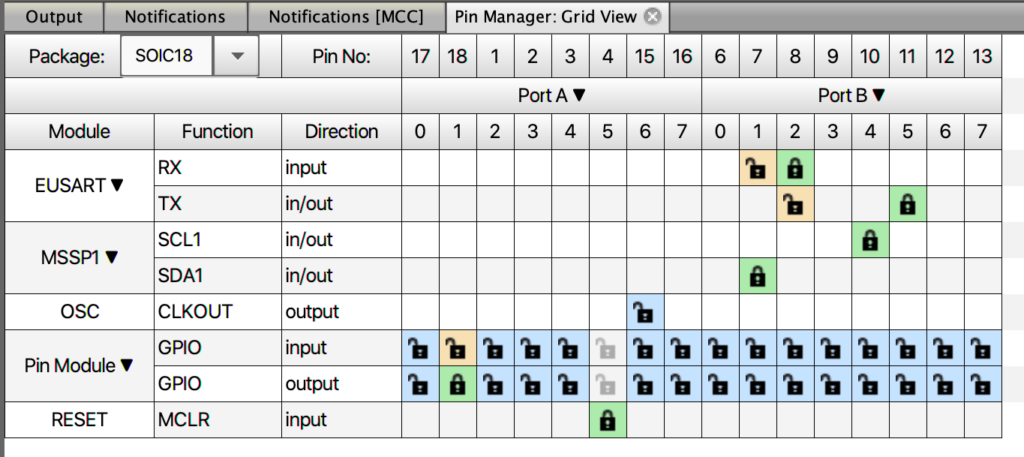
MCCでMSSP1をI2Cに設定。
I2CとEUSARTでピンが重なるので、Pin Manager Grid ViewでEUSARTのピンを変更。
I2Cで使うデバイス
今回はAmazonで買った電子コンパスのQMC5883Lを載せたモジュールを使います。
Arduioにはライブラリがあるので、それも参考にしました。
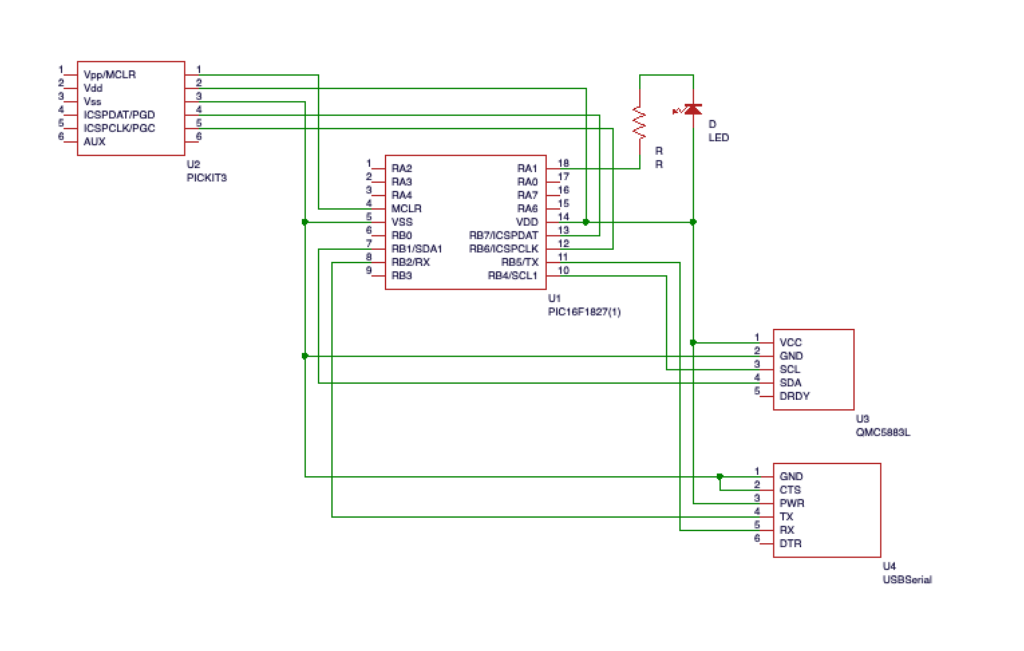
回路図
回路図は次のようになります。EUSARTのRx/Txのピンを変更してあるので注意してください。
コーディング
I2Cの便利な関数がexamplesに生成されているので、その関数を使いました。
Arduinoのライブラリでは方位も出力できますが、メモリーが足りなくてそこまで実装できていません。
/**
Generated Main Source File
Company:
Microchip Technology Inc.
File Name:
main.c
Summary:
This is the main file generated using PIC10 / PIC12 / PIC16 / PIC18 MCUs
Description:
This header file provides implementations for driver APIs for all modules selected in the GUI.
Generation Information :
Product Revision : PIC10 / PIC12 / PIC16 / PIC18 MCUs - 1.81.0
Device : PIC16F1827
Driver Version : 2.00
*/
/*
(c) 2018 Microchip Technology Inc. and its subsidiaries.
Subject to your compliance with these terms, you may use Microchip software and any
derivatives exclusively with Microchip products. It is your responsibility to comply with third party
license terms applicable to your use of third party software (including open source software) that
may accompany Microchip software.
THIS SOFTWARE IS SUPPLIED BY MICROCHIP "AS IS". NO WARRANTIES, WHETHER
EXPRESS, IMPLIED OR STATUTORY, APPLY TO THIS SOFTWARE, INCLUDING ANY
IMPLIED WARRANTIES OF NON-INFRINGEMENT, MERCHANTABILITY, AND FITNESS
FOR A PARTICULAR PURPOSE.
IN NO EVENT WILL MICROCHIP BE LIABLE FOR ANY INDIRECT, SPECIAL, PUNITIVE,
INCIDENTAL OR CONSEQUENTIAL LOSS, DAMAGE, COST OR EXPENSE OF ANY KIND
WHATSOEVER RELATED TO THE SOFTWARE, HOWEVER CAUSED, EVEN IF MICROCHIP
HAS BEEN ADVISED OF THE POSSIBILITY OR THE DAMAGES ARE FORESEEABLE. TO
THE FULLEST EXTENT ALLOWED BY LAW, MICROCHIP'S TOTAL LIABILITY ON ALL
CLAIMS IN ANY WAY RELATED TO THIS SOFTWARE WILL NOT EXCEED THE AMOUNT
OF FEES, IF ANY, THAT YOU HAVE PAID DIRECTLY TO MICROCHIP FOR THIS
SOFTWARE.
*/
#include "mcc_generated_files/mcc.h"
#include "mcc_generated_files/examples/i2c1_master_example.h"
#include <string.h>
// QMC5883L
#define QMC5883L_ADDR (0x0D)
volatile uint8_t flag;
volatile uint8_t data0[1];
volatile uint8_t data8[8];
int16_t vRaw[3];
char cbuff[32];
void qmc5883l_init(void)
{
I2C1_Write1ByteRegister(QMC5883L_ADDR, 0x0B, 0x01);
I2C1_Write1ByteRegister(QMC5883L_ADDR, 0x09, 0x01|0x0C|0x10|0X00);
}
void qmc5883l_read(void)
{
data0[0] = 0;
I2C1_WriteNBytes(QMC5883L_ADDR, data0, 1);
I2C1_ReadNBytes(QMC5883L_ADDR, data8, 8);
vRaw[0] = (int16_t)(data8[0] | data8[1] << 8);
vRaw[1] = (int16_t)(data8[2] | data8[3] << 8);
vRaw[2] = (int16_t)(data8[4] | data8[5] << 8);
flag = 1;
}
void usart_write(uint8_t *data, size_t len)
{
size_t i = 0;
while (i < len) {
if (!EUSART_is_tx_ready()) {
;
}
EUSART_Write(data[i]);
i++;
}
if (!EUSART_is_tx_ready()) {
;
}
EUSART_Write(0x0D);
if (!EUSART_is_tx_ready()) {
;
}
EUSART_Write(0x0A);
}
/*
Main application
*/
void main(void)
{
// initialize the device
SYSTEM_Initialize();
// When using interrupts, you need to set the Global and Peripheral Interrupt Enable bits
// Use the following macros to:
// Enable the Global Interrupts
INTERRUPT_GlobalInterruptEnable();
// Enable the Peripheral Interrupts
INTERRUPT_PeripheralInterruptEnable();
// Disable the Global Interrupts
//INTERRUPT_GlobalInterruptDisable();
// Disable the Peripheral Interrupts
//INTERRUPT_PeripheralInterruptDisable();
IO_RA1_SetHigh();
__delay_ms(100);
flag = 0;
qmc5883l_init();
while (1)
{
// Add your application code
if (flag == 0) {
IO_RA1_SetLow();
qmc5883l_read();
}
if (flag) {
if (EUSART_is_tx_ready()) {
sprintf(cbuff, "x=%d, y=%d, z=%d", vRaw[0], vRaw[1], vRaw[2]);
usart_write(cbuff, strlen(cbuff));
}
flag = 0;
IO_RA1_SetHigh();
}
__delay_ms(500);
__delay_ms(500);
}
}
/**
End of File
*/
プロジェクトのファイル一式です。
p1827_i2c.X.zip
出力
動かすと、Mac側のターミナルに次のようなデータが約1秒毎に出力されます。
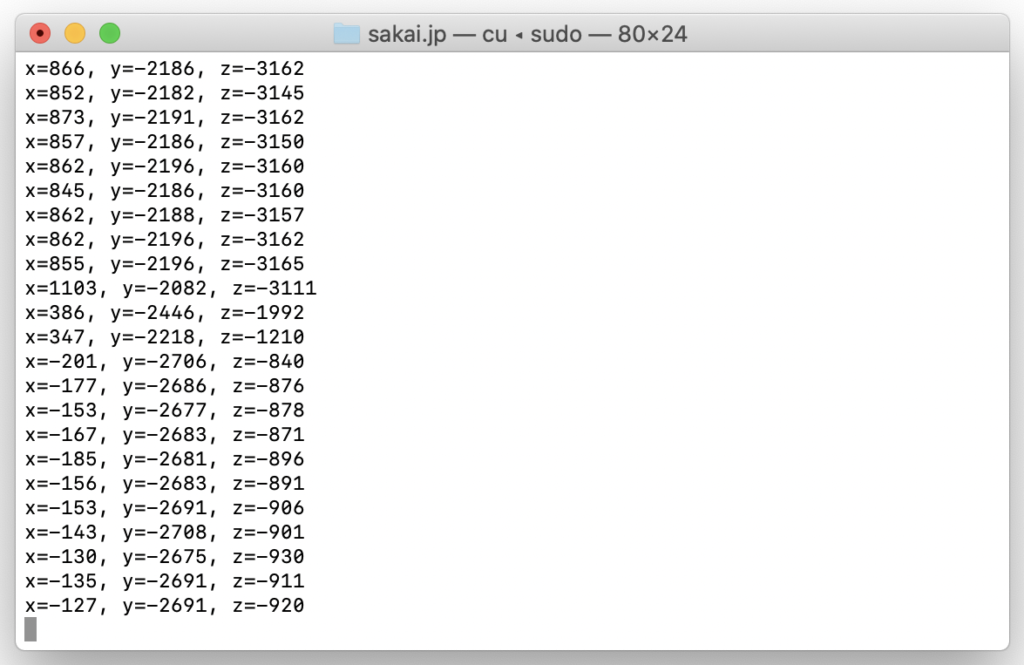
写真