
いよいよモーター制御を試してみる。
モータードライバはTA7291Pを使う。
まずは動いている動画から。
単3のエネループ2本がモーター用電源。その右の黒い電池ボックスが回路用電源。
数秒毎に反転させています。
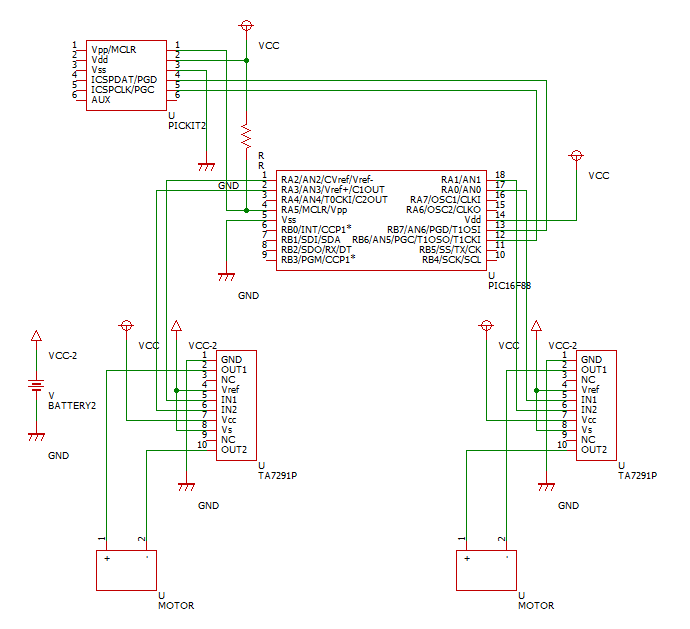
TA7291Pのデータシートを見ながら、回路図を書いた。
BATTERY2がモーター用電源。
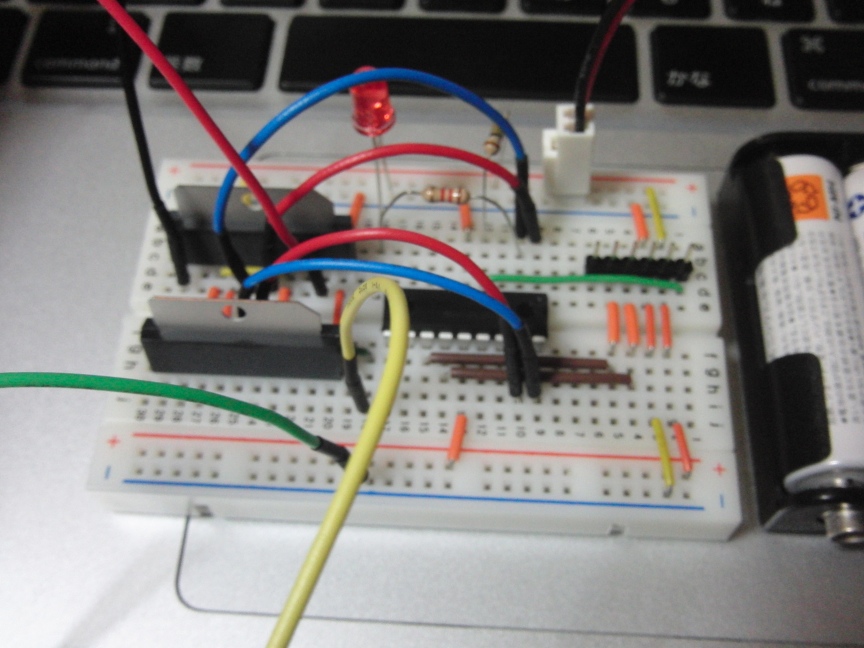
回路図を元にブレッドボードに組みました。
奥のTA7291Pから出てる赤と黒のケーブルをモーター(FA130RA)へ。
手前のTA7291Pの横から出てる黄色と緑のケーブルをモーター用電源(単3エネループ×2)へ。
このブレッドボードだとキチキチなのでセンサーや動作確認のためのLEDを付ける余地がありませんでした。
実際に組む時はもっと大きなブレッドボードを使わないといけない。
※TA7291Pのデータシートの使用上の注意に、「Vccに印加した後にVsを印加してください(あるいはVccとVsを同時に)」とあります。